
AGV的上部安装了激光扫描器,激光扫描器随AGV的行走,发出旋转的激光束。发出的激光束被沿AGV行驶路径铺设的多组反光板(全向反光板)直接反射回来,触发控制器记录旋转激光头遇到反光板时的角度。控制器根据这些角度值与实际的这组反光板的位置相匹配,计算出AGV的**坐标,基于这个原理就可以实现非常**的激光导引;
现阶段激光反光板导航是导航精度**的导航方式,定位精度在毫米级,主要应用在叉车式AGV导航。
探测角度:360°
激光**级别:Ⅰ类激光、****
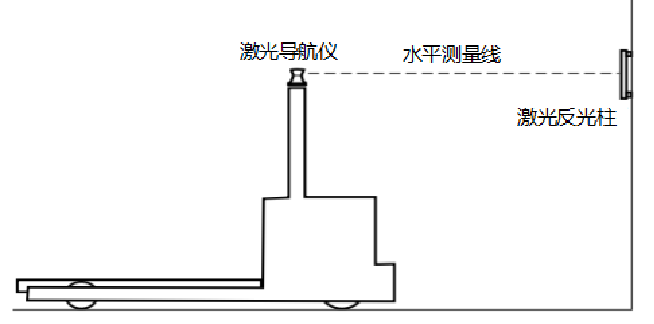
原理简介:基于反光板的激光导航是通过激光发射器连续不停的发射激光脉冲,由旋转光学机构将激光脉冲按一定角度间隔(角度分辨率)发射向扫描角度内的各个方向而形成一个以径向坐标为基准的二维扫描面。激光雷达通过识别扫描范围内的物体表面反射率,来识别激光反光板的位置信息(X,Y),再通过**少三个反光板的位置计算出激光雷达所在的AGV的位置和姿态信息(X,Y,a)。




 公众号
公众号