
 agv
agv
AGV作为智能物流的重要载体,具有智能化、效率高、可靠性高、易安装维护等优势,能够有效降低工厂和仓库的人力成本,目前广泛地应用于各行各业。 今天小编就为大家介绍一下AGV小车的关键技术有哪些。
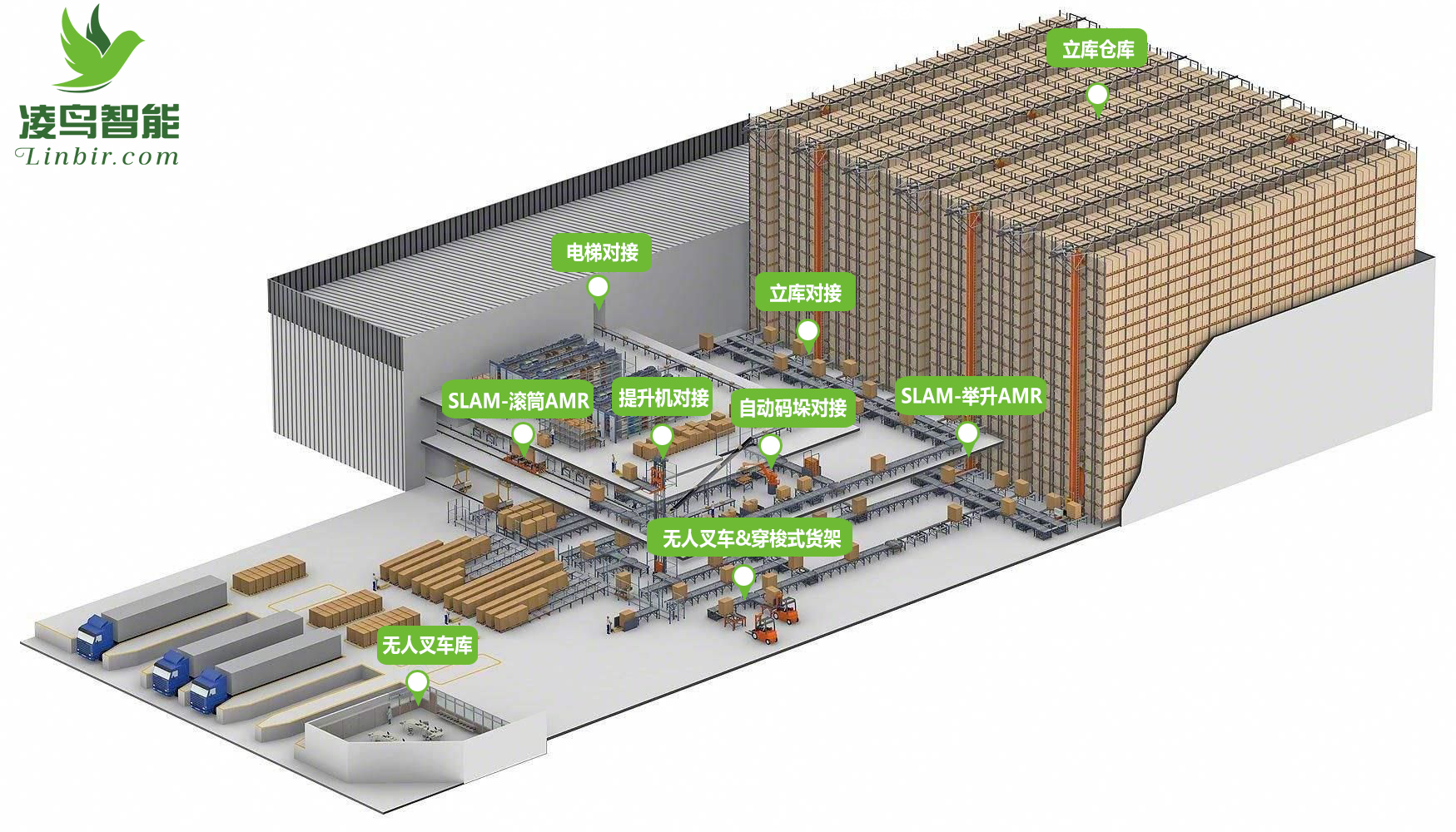 智慧无人工厂
智慧无人工厂
 agv地牛小车
agv地牛小车
(1)环境感知与信息融合技术
AGV能够依靠传感器感知外部环境和自身状态,实现自主行驶任务。AGV作为智能搬运工具,既需要感知和判断周围环境,也需要监控自身实时状态,准确的应用传感器技术能有效对AGV小车准确稳定的运行,故具有十分重要的意义。利用多源信息的关联组合,充分识别、分析、估计、调度数据,完成下达决策和**处理信息的任务,并对周围环境、战况等进行适度的估计。AGV作为智能搬运工具,既需要感知和判断周围环境,也需要监控自身实时状态,准确的应用传感器技术能有效对AGV小车准确稳定的运行,因此具有十分重要的意义。
(2)定位和导航导引技术
对于AGV来说导航技术是不可或缺的,是AGV智能化以及完全自主工作的关键技术之一,也是AGV技术研究的核心部分。定位导航技术好坏直接决定了AGV的**性和性能稳定性,同时也决定AGV功能性、应用实用性、自动化程度等关键因素。定位是即通过传感器来感知外部信息,通过主控制器的有效控制,以确定被控装置在现场布局中的位置。定位技术即可以控制AGV在路径中的位置,通过位置信息准确下达对应任务。AGV的导航引导方式也多种多样,主要分为磁导航、光学导航、激光导航、视觉导航、GPS导航和惯性导航等。各种导航引导技术也具有各自的优缺点,适用于不同的场合。因为每一种导航方式都有自己的优势与不足,基于多种导航引导方式进行融合的导航方式能够达到相辅相成的引导效果。成为目前研究应用的热点。
 agv智能叉车
agv智能叉车
(3)路径规划
AGV通过导航系统完成周围信息的感知,下一步就是如何根据获取的信息进行行驶路径的规划。根据在路径规划开始时是否存在完整的环境信息,可以将路径规划方法划分为两大类:已知环境中的路径规划与未知环境中的路径规划。其中未知环境包含在路径规划开始时环境信息完全未知或者部分未知、以及环境内存在移动障碍物且移动不可预测等情况。通过自身传感系统的感知并综合自身的运动状态不断的规划出在当前环境中无障碍、可通行的路径。
(4)运动控制与路径跟踪
在规划完AGV的行驶路径之后,下一步就是要求AGV准确快速实现期望路径的跟踪。对于AGV的运动控制与目标路径的稳定跟踪是自主行驶的关键技术。目前应用较多的仍然是采用基于误差反馈的闭环控制策略来**系统跟踪误差。为保证其实时性、鲁棒性及AGV行驶的稳定性要求,AGV的运动学和动力学计算以及如何设计良好的反馈控制律是目前AGV运动控制研究中的一个活跃领域。
 多辆agv调度
多辆agv调度
(5)智能控制技术
从20世纪初,控制理论就得以发展演变,随着现代控制理论不断融入新学科技术,如模糊数学、神经网络等等,目前传统的控制技术已逐步发展为能更好解决复杂系统控制问题的智能控制技术。智能控制(intelligent controls)是效仿人的智能,具备自主学习、推测及决策等功能,并且无需人为干预或帮助,能自主根据控制对象或控制环境的变化做出有效的推测和决策。智能控制是控制理论发展的必然趋势,在深度和广度上明显优于传统控制方式,是计算机科学技术、信息技术等学科知识的互相渗透,控制科学与工程研究的不断发展。AGV系统在运动控制模型和动力控制模型存在不确定性、复杂性、非线性性等特点,而智能控制正好能很好地实现控制。目前应用于AGV较多的控制方法是模糊控制、神经网络控制、遗传算法控制、模式识别控制等,而且前两者应用较多。
 agv无人叉车
agv无人叉车


 公众号
公众号