
 agv
agv
AGV小车其主要用途是提高运输的工作效率及自动化水平,在工业自动化工厂应用广泛,替代传统的人工搬运,能够大大降低企业成本,提高利润。我们都知道AGV**性极高,具有自我避障功能,但是有时出现无法感应到障碍物的故障,是什么原因呢?
 搬运机器人
搬运机器人
1.传感器本身的问题。例如采用红外、激光雷达或视觉的方案的AGV机器人遇到面前是一块完全透明的玻璃,那么就可能因为这个光线直接穿过玻璃导致检测失败,这时候就需要超声波这样的传感器来进行障碍物的侦测。因此AGV小车运用多种传感器的结合是比较好的,通过对不同传感器采集到的数据进行一个交叉验证,以及信息的融合,更能保证小车运行的**性。
2.与其他传感器串扰。比如利用超声波测距,一般需要超声阵列,如果同时工作的话,阵列之间的传感器,就会容易互相产生干扰,传感器A发射的光波反射回来被传感器B接收,导致测量结果出现错误,但是如果按照顺序进行工作,因为AGV超声波传感器采样的周期相对比较长,会减慢整个采集的速度,对实时避障造成影响,这就要求从硬件的结构到算法都必须设计好,尽可能提高采样速度,减少传感器之间的串扰。
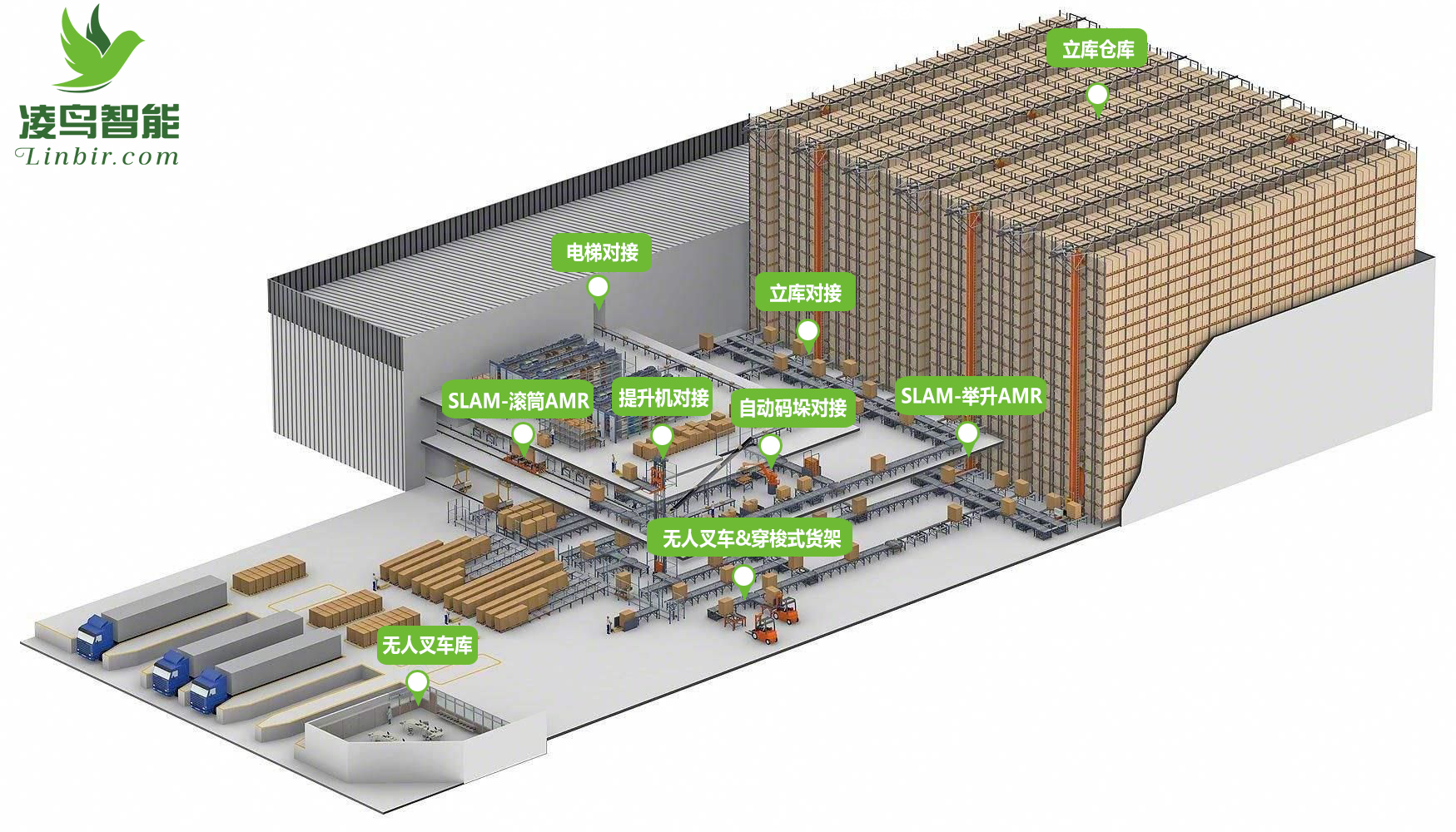 无人仓
无人仓
3.电容兼容性问题。在AGV小车行驶过程中,电机和驱动器在工作过程中会产生电容兼容性的问题,可能会导致传感器采集信息出现错误,尤其是模拟的传感器,所以要注意保持隔离电机驱动器等设备、传感器的采集部分,以及电源通信部分,保证整个系统能够正常工作。


 公众号
公众号