AGV小车定位原理——识别反光柱坐标
通过过滤反射系数,可以得到同一反光柱上多个激光点的详细数据(角度、距离、反射系数)。然后通过简单的数学计算和规律分析,就可以得到该反光柱相对导航仪的准确坐标。
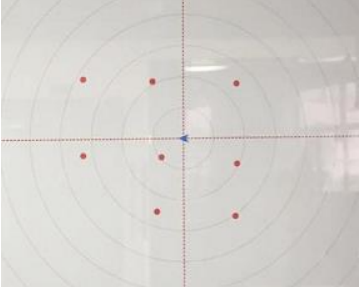
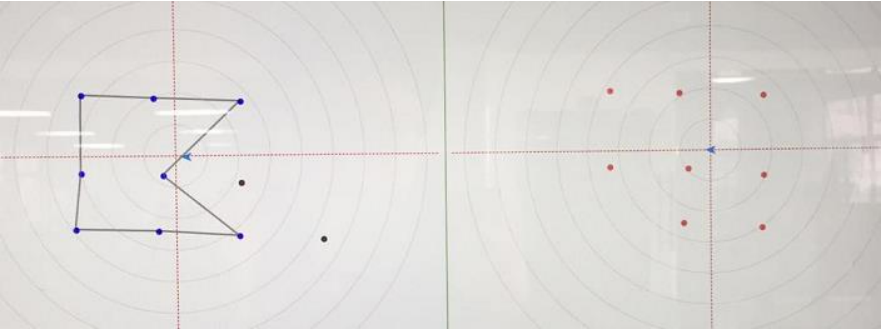
AGV叉车定位原理——定位匹配
想要获得AGV激光导航仪坐标和角度,必须同时满足以下2个条件:
①AGV叉车导航仪**少可以扫描到3个反光柱
②叉车AGV激光导航仪扫描到的多个反光柱构成的图形,在已有地图数据中,可以成功匹配到相同构形。利用已有地图数据,结合即时扫描的反光柱坐标,反推出AGV导航仪位姿。