
 agv智能叉车
agv智能叉车
**、低成本的物料运输是许多制造工厂和仓库改进运营情况的一项重要措施。AGV小车可以实现**的、低成本的物料运输,并且在**性方面,与其他的材料运输方法相比, AGV是非常**的,特别是与人工搬运的方式相比较。AGV的主要优点之一是它们不会破坏人员或基础设施。事实确实如此,AGV比传统的手动车辆如传统叉车更**。
 智能仓储
智能仓储
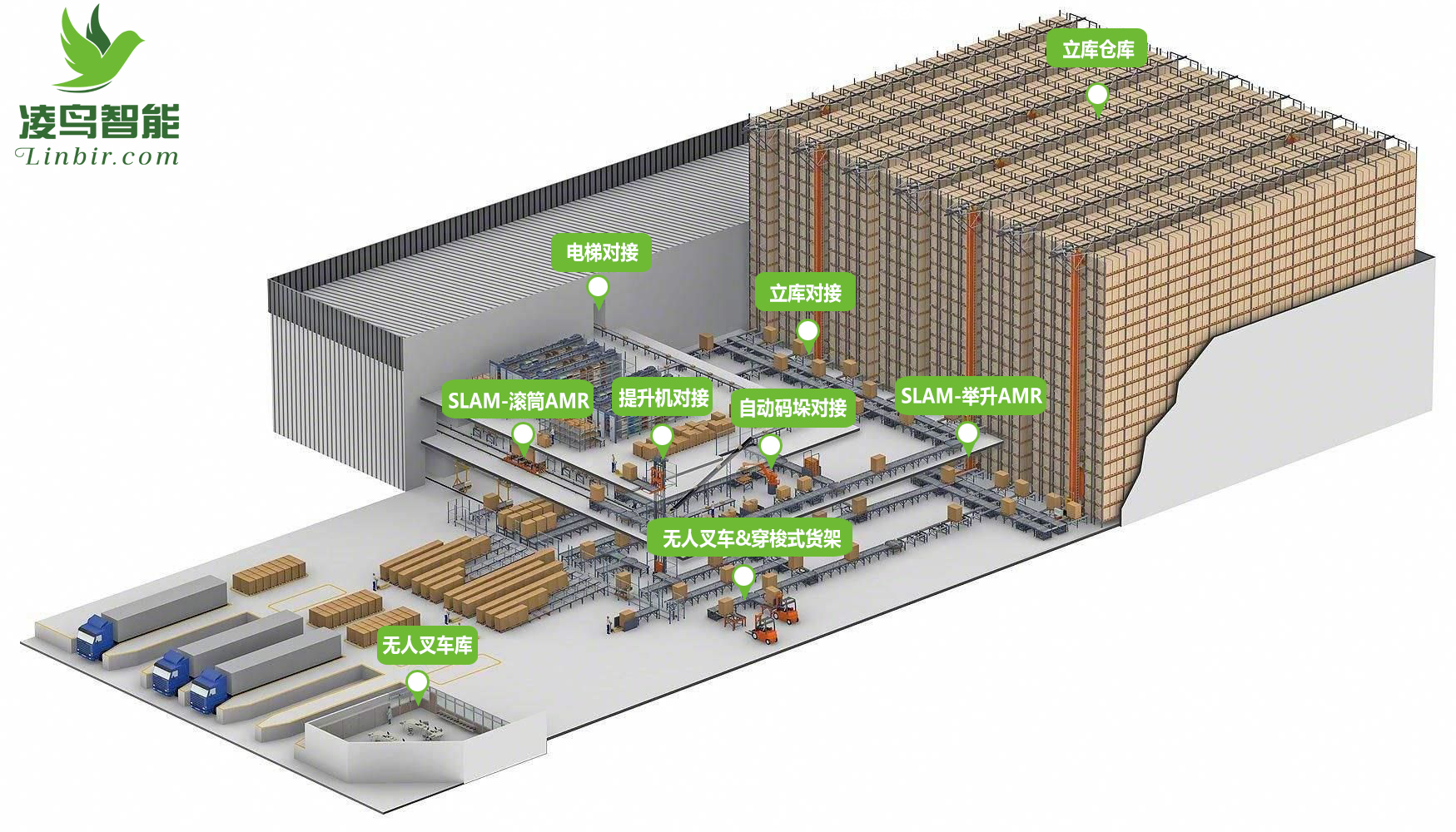
仓储运输,是许多企业必须经历的一道作业,以前一直都是人工来完成,现在随着智能化时代的到来,一部分工作由机器人代替已经逐步实现,比如物流机器人、送餐机器人等。AGV搬运机器人,也叫无人搬运车,简单理解就是可以通过人工设定的路径,小车可以自动去搬运货物存放,作为工业自动化物流的主要实现方式,被广泛应用在重复性搬运、搬运工作强度大、工作环境恶劣、环境要求高的领域。
 agv小车
agv小车
其实AGV有很多**装置,以防止意外发生,如闪烁的灯光,音响装置,物理紧急保险杠,红外和超声波设备。此外,美国**标准协会(ANSI)规定指明了布局要求,制动距离和其他**相关的项目,以确保**实施AGV系统。
如何避免AGV相互冲撞,而在同一条路径上运行?这里就要讲到交通管制,例如多辆AGV的柔性制造系统就要求有交通管制,使AGV不会碰到彼此。交通管制可以在AGV本地执行或通过工厂中其他地方的固定电脑中的软件来执行。本地方法包括区域控制,传感器控制和综合控制。每种方法都有其优点和缺点。
 无人叉车
无人叉车
(1)区域控制。区域控制是大多数环境下**乐于使用的,因为它安装简单,易于扩展。区域控制使用无线发送器在一个固定的区域发送信号。每个AGV包含一个感应装置来接收该信号,并应答给发送器。如果某个区域是空的,该信号被设为“空”,允许任何信号进入并通过该区域。如果有AGV在区域中时,发送“停止”信号,所有试图进入该区域的AGV停止并等待轮到自己。一旦区域中的AGV已经移除到区域外,则立即发送“空”信号给正在等待的AGV之一。建立区域控制交通管理的另一种方式是使每个机器人都有自己的小型发射器/接收器。每个AGV会发送自己的“不要进入”消息给所有靠近它的空间区域的AGV。这种方法的一个问题是,如果一个区域发生故障,则所有AGV有与其他任何AGV碰撞的危险。区域控制是一种低成本的有效的区域AGV控制方式。
(2)传感器控制。传感器控制是使用避障传感器来避免与区域内的其他AGV发生碰撞。传感器包括:超声波传感器,和雷达的工作原理类似;光学传感器,使用红外线传感器;保险杠,物理接触传感器。大多数AGV装配有某种形式的保险杠传感器来作为故障保险。超声波传感器发出线性调频脉冲或高频信号输出,然后等待回复, AGV通过判断回复信号的轮廓可以判断前方是否有物体,并采取必要的行动以避免碰撞。光学式传感器使用红外发送器/接收器,发射一个红外信号,然后会反射回来,它的工作方式和超声波传感器是类似的概念。
 agv调度
agv调度
使用传感器控制与区域控制相结合的综合控制方式来实现AGV车之间交通管制。系统中每台AGV装有两个红外避障传感器,一个装在正前方,用于检测正前方的障碍物,另一个装在右前方,用于检测侧面的来向车辆。为了保险起见系统还综合使用区域控制的方式,调度**会在可能发生碰撞的区域设置一个互斥信号。当有AGV进入该区域时,会占用该互斥信号,这时调度**会向试图进入该区域的其他AGV发送停止信号,等待前一辆车走出改区域时,互斥信号释放,后一辆车才能进入该区域。
 agv地牛L100
agv地牛L100


 公众号
公众号